
Gazebo仿真遇到的一些问题
soildwork导出urdf
为了将自己的机械臂导入Gazebo进行仿真,首先我们需要在Soildwork上下载一个将soildwork模型转化成urdf文件的插件,可以在ros的官网找到,稍后我插入链接
在安装完插件,导出文件时有一点需要非常注意,那就是导出文件的名称不能有大写字母和中文!!!这是ros的命名规则,否则在后面进行编译的时候会有错!!!
在导出后,会有以下这几个目录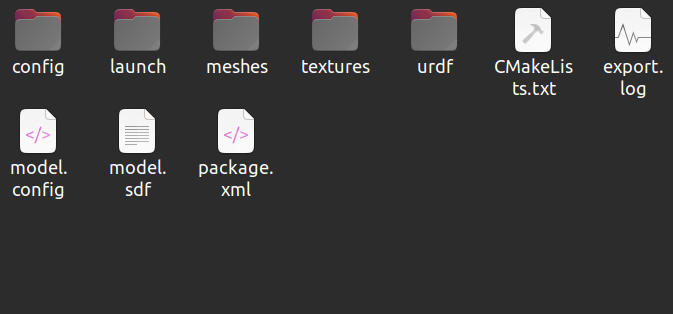
忽略掉model.sdf和model.config。这是后面在使用gazebo的时候需要自己再额外搞的。
其中,如果我们使用的是ROS2,则需要去CMakeLisits。txt文件中去修改,导出的文件配置是按ROS1来的,点进去CMake文件会发现有catkin,这个是ROS1的工具,要全部改成ament_cmake,可以参考我这个
1 | cmake_minimum_required(VERSION 3.5) |
以上是修改过后的CMakeLists.txt文件
然后就可以丢到自己搞的ROS2的工作空间里的src,在工作空间里打开终端,使用命令
1 | colcon build |
还没写完,持续更新

评论

