
如何在ROS2中使用YOLO
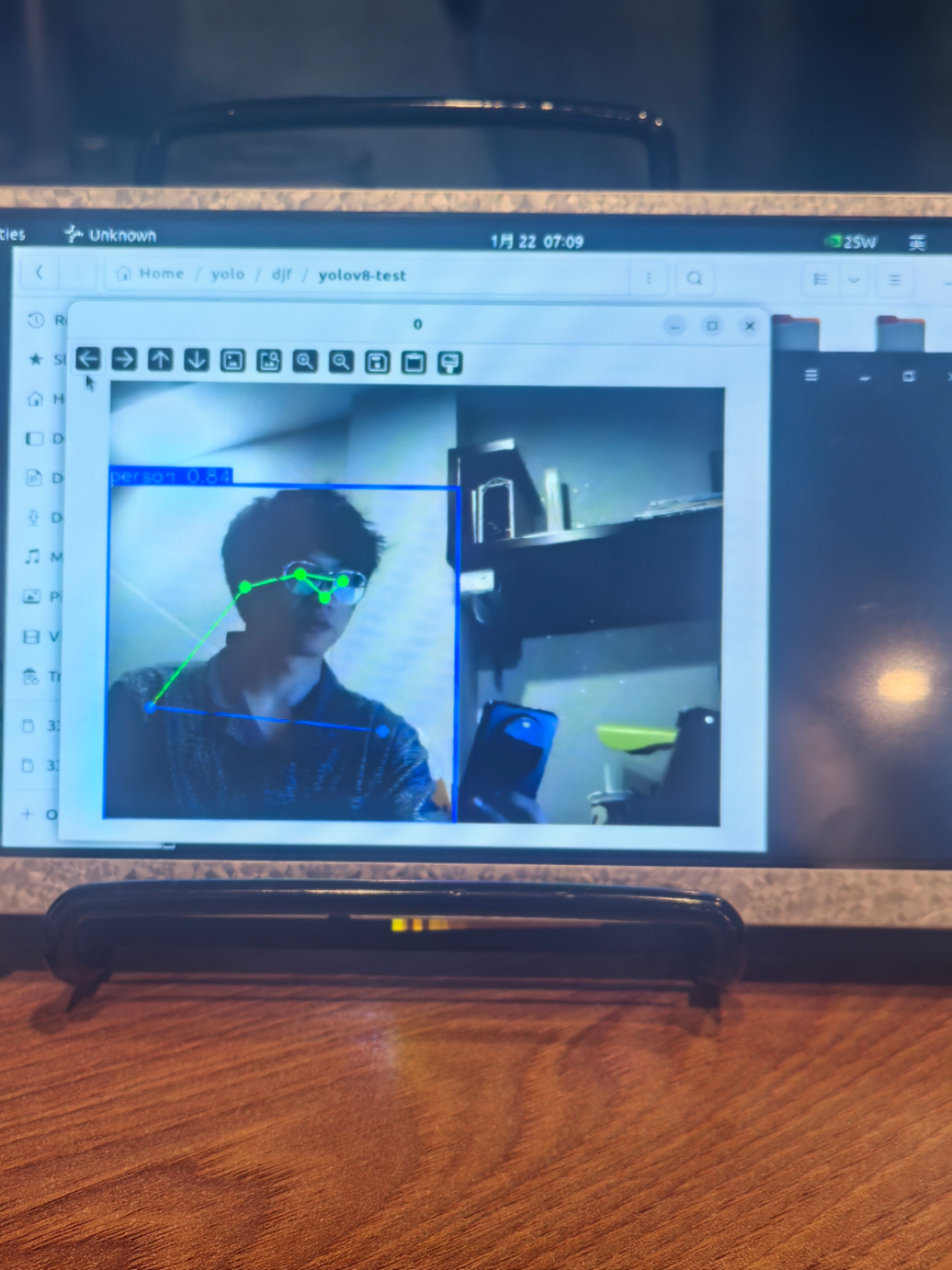
使用Python去调用Yolo 在之前使用yolo进行预测的时候,大多数通过命令行去执行
1yolo detect predict model=yolov8n.engine source='0' device=0
然后它就会打开摄像头,你就可以实时看到yolo处理过后的摄像头的画面,但是它背后是怎么去工作的呢?我之前去使用过yolov5,我的印象当中他有一个predict.py的文件,修改它,再执行就可以了。但是yolov8似乎并没有类似的现成的文件,但是封装性更强了,没有v5的什么一堆配置文件,支持命令行和API的直接调用。 那就让我们着手去看,一步一步深挖它到底怎么从命令行去调用API最后实现预测的,想省事可以直接跳过,看怎么用API,但是我还是建议跟着看一遍,去打开对应的文件瞧瞧,理解能更深刻一点。 在我们输入命令的时候,由于我使用的是Anaconda的虚拟环境,它会去环境当中寻找是否有这个命令,也就是是否有yolo这个命令,他一般会存在于:Anaconda/env/yolov8/bin/这个文件路径当中,其中 ...

Gazebo仿真遇到的一些问题
soildwork导出urdf为了将自己的机械臂导入Gazebo进行仿真,首先我们需要在Soildwork上下载一个将soildwork模型转化成urdf文件的插件,可以在ros的官网找到,稍后我插入链接
在安装完插件,导出文件时有一点需要非常注意,那就是导出文件的名称不能有大写字母和中文!!!这是ros的命名规则,否则在后面进行编译的时候会有错!!!
在导出后,会有以下这几个目录忽略掉model.sdf和model.config。这是后面在使用gazebo的时候需要自己再额外搞的。其中,如果我们使用的是ROS2,则需要去CMakeLisits。txt文件中去修改,导出的文件配置是按ROS1来的,点进去CMake文件会发现有catkin,这个是ROS1的工具,要全部改成ament_cmake,可以参考我这个
12345678910111213cmake_minimum_required(VERSION 3.5)project(leonardoss)find_package(ament_cmake REQUIRED)ament_package()foreach(dir config la ...

有关雾化器的研究
毕业设计的一些前置文献查阅、了解

ROS是什么东西?
ROS2的一些心路历程

Deutch_Dictionary
安卓德语字典太麻烦,苹果没包年德语词典跳广告,故利用本站搜索功能当辞典

Adjektivdeklination im Nominativ/Akkusativ/Dativ/
德语学习 | 不同格内的变位(更新中)

TCP和UDP
使用IDF开发ESP32的WIFI功能 (更新中)

Hallo
欢迎来到我的博客